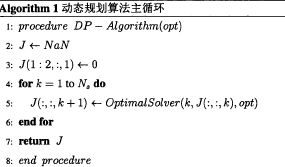
基於動為學的機械臂最(zuì)優軌跡規劃4(給定運動時間的能量最優軌跡規(guī)劃)
2018-8-7 來源: 浙江大學(xué) 控製(zhì)科 作(zuò)者: 胡友忠 劉勇 熊蓉
4.1引言
能源危機越來越受到世界的關(guān)注(zhù),而使用工業機器人的(de)先進生產(chǎn)係統通常會(huì)消耗大(dà)量的能源,因此如何在工業生產中降低能耗成為科學(xué)界研究的重要方向(xiàng)。由於這樣的(de)生產係統通常都是全(quán)天候運行的,在毎個運動周期(qī)中降(jiàng)低很少的能量消耗都能對係統整體的能量消耗產生重大影響(xiǎng)。機械臂任務的執行通常是整個生產過程(chéng)中的一環,因此機械臂執行任務的時間一般也是上(shàng)層生產調度係統指(zhǐ)定的,W此(cǐ)來配合其他生(shēng)產任務。本(běn)文針對這(zhè)種情況提出了給定運動時間的能(néng)量最優軌跡規劃(huá)方法,來盡量堿少生產過程中的能量消耗。本章組織結構如下:4.2節首先描述了基本的給定時間能量最優軌跡規劃問題,為了求(qiú)解這個(gè)問題又構(gòu)建了一個(gè)離散化的狀態(tài)空間模型:4.3節先簡單介紹了(le)動態規劃算法,再提出了使用動態規劃算法求解這一(yī)問題的具體算法偽代碼;4.4節在ABB六軸工業機器人IRB120上驗證了送(sòng)一算法的(de)有效性。
4.2問題摸型建立
現(xiàn)在己經(jīng)有很多(duō)方法用於(yú)解決能量最優問題,如動態規劃法(fǎ)及後來的迭代動態規劃方法、參數化的B樣條方法、龐特裏至京極大值原理等(děng)。通常在使用動態規劃方法優化(huà)過程中運動時間是不確(què)定的,而本章建立的棋型采用動態規劃方法求解可產生給定運動時間的能量最優軌跡規(guī)劃。采用動態規劃方法的好處在於無需考慮問題模型的複雜度,可W在整個(gè)網格中搜索(suǒ)最優解。在本章采用(yòng)的模型中,在考慮時間最優軌跡規劃結果的前提下將規劃軌跡巧(qiǎo)有可能(néng)的運動時間都存在於網格中,因此(cǐ)可W使用動態規劃方法在較短的(de)時(shí)間巧(qiǎo)通(tōng)過一次(cì)運算得到(dào)給定時間的能量最優軌跡規劃結(jié)果。
4.2.1基本問題描述
4.2.2建摸
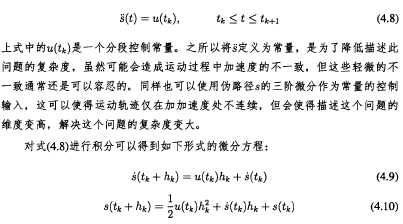
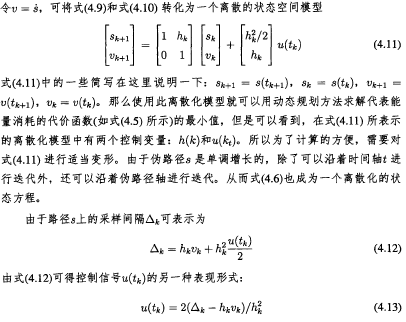
接下(xià)來的問題就是如(rú)何求解s(t)了。假設知表示的是時間(jiān)下標為fc的時間常量,而bfc表示的是一個時間下標為&可變的采樣時間間隅,因此就存在這樣的

圖4.1歸一(yī)化的巧時間s到時間t上的映(yìng)射

4.3基於動態規劃的給定運動時間能量最優軌跡規劃
4.3.1節簡單介紹了一下動態規劃算法,4.3.2節提出了應用動態規劃算(suàn)法求解的能量最優軌跡規劃問題(tí)的具體(tǐ)算法。
4.3.1動態規劃算法概述(shù)動(dòng)態(tài)規劃算法是一種十分常用(yòng)的最優(yōu)化方法(fǎ),其(qí)通過重複求解(jiě)子問題從而解決複雜(zá)的問(wèn)題(tí)。這類複雜(zá)問題通常可用一(yī)個(gè)簡單的狀態空間模型定義,並由一個或者(zhě)化個控製信號進行控(kòng)製。為了解決這類問題,通(tōng)常(cháng)將問題分(fèn)為iV個(gè)子問題,並有著iV+1個階段,通過控製信(xìn)號使(shǐ)得各個狀態在不同階段之間進行變換。圖4.2顯示了如何將一個簡單問(wèn)題分為王個子問題四(sì)階段。根據毎個阱段上的狀態,控製輸入將會動態的變化使得(dé)代價函數最大化或者最小化。
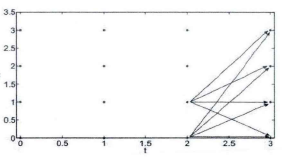
圖4.2動態規劃算法問題分(fèn)割簡單(dān)例子
動態規劃算法(fǎ)毎次都是針對一個子問題進行計算的,在解決整個問題(tí)的過程中可W是逆序的從最(zuì)後一個子問題計算到第一個子問題,也可(kě)以是順序的從(cóng)第一個子問題計算(suàn)到最後一個子問題,並且用每個階段的(de)狀態計算從當前階段的狀態變(biàn)換到下一階段狀態所(suǒ)要付出的代價。一般采用順序形式的動態規劃方法求解的最優化問題的表現(xiàn)形式如下所示.
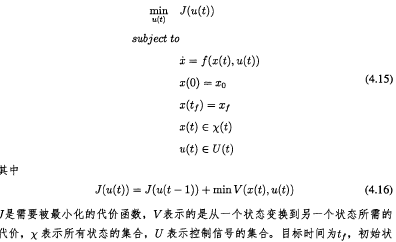
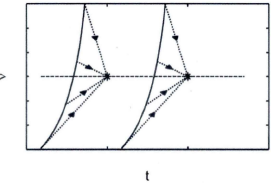
圖4.3當前狀態與下一階段某狀態麽間的(de)對(duì)應關係


4.4實(shí)驗(yàn)與分析
本節(jiē)在ABB六軸工業機器人(rén)IRB120上實現基於給定(dìng)時間的(de)能(néng)量最優軌跡規劃,並利用ABB公司提供的RobotStudio仿真平台做(zuò)對(duì)比試驗,驗證此算法的有效性(xìng)。4.4.1介紹了將要使用的Robots山dio仿真台,4.4.2節說明(míng)了實驗結果。
4.4.1實驗平台介紹
RobotStudio是ABB公司推出的一款仿真軟件(如圖4.4所示),主要用於工業機器人的(de)離(lí)線編程。它使得用戶可W在(zài)仿真環境中(zhōng)定義生產動(dòng)作或任(rèn)務,並旦能夠準確的(de)對這些任務進行仿真,W至於能夠在真實的(de)生產環境中複現仿真結果。
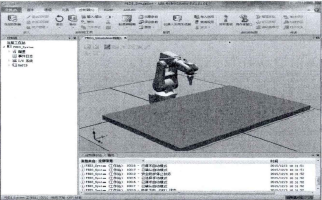
圖4.4ABB仿真軟件RobotStudio
RobotStudio仿真軟件之(zhī)所從能夠(gòu)實(shí)現如此高精度的仿真(zhēn),歸功於ABB的虛擬控製器(qì),這個虛擬控製器和跑在實際機(jī)器人上(shàng)的控製器(qì)是相同的。而在(zài)仿真環境中控(kòng)製機器人運動的代碼是用RAPID語言編寫,這種語言同(tóng)樣也用在實際王業機械臂上(shàng)。在(zài)進(jìn)行機械臂運動仿真之前,首先需要先定義運動過程。一個簡單的(de)運(yùn)動過程包括一條機器人需要運動的路徑。這條路徑可由RobotStudio提供的指令來決定,我們隻需要給出機械臂末端起(qǐ)始點的位置和朝向,W及目標點(diǎn)機械臂(bì)末端的位置和朝向,通過RAPID語言內置指令MoveL可W令機(jī)械臂末端在笛卡爾空間中的這兩點之間沿著直線運動(dòng),同時運(yùn)動(dòng)的時間是可指的。Robots化(huà)dio也(yě)提供了相關(guān)指令(lìng)來獲取機械臂運動過程中的當前速度。
4.4.2實驗結果
本次實驗的路徑如下圖4.5所(suǒ)示,是一條笛卡爾空間中的倒y字曲線。
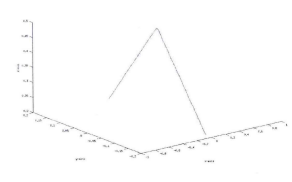
圖4.5實驗路徑
現采用王種軌跡規劃(huá)方式對於這條給定路徑進行軌跡規劃,第一種是本(běn)論文第王章提出的時間最優軌跡規劃方法,其規劃出的驅動力矩曲(qǔ)線(xiàn)如圖4.6所示(shì);第二種是使用Robots化dio中自帶的軌跡規劃方式,這也是ABB公司機械臂在實際生產中所使用的規劃方式,通過輸入(rù)運動路徑中間點信(xìn)息,給定的運動時間為1化,就可得到11〇13〇15111出規劃出的關機位置曲線和關節速度曲線,通過IRB120工業機械臂(bì)的動(dòng)為學模型就(jiù)可計算出(chū)完成指定運動所需的驅動為矩曲線(如圖4.7所(suǒ)示(shì))
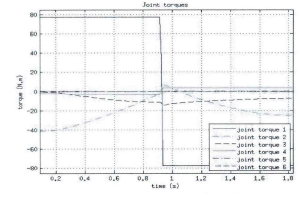
圖4.6時(shí)間最優軌跡規劃驅動力巧曲線
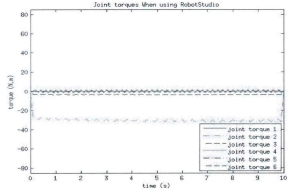
圖4.7RobotStudio軌跡規劃驅動力(lì)矩曲線
圖4.7RobotStudio軌跡規劃驅動力矩曲線(xiàn)第蘭種是本章提化的基於給定時間的能量最優軌跡規劃方(fāng)法,其指定的運動時間也是10s,規劃出來的驅動為矩去向如(rú)圖所示。為了能夠比較(jiào)直觀的比較這S種規劃方式的耗能情況,在這裏畫出這王種軌跡規劃方法規劃結果的(de)耗能曲(qǔ)線(如圖4.9所示),此處的能耗指的是各關節驅(qū)動為(wéi)矩的平方在時(shí)間軸上的積分。
表4.1表示的是這蘭種軌跡規劃方式(shì)耗能情況在數字上的(de)直觀對比,其結果化比較符合預期:時間最優軌跡規劃方(fāng)法耗能最多(duō),RobotStudio默認的(de)軌跡規劃方法耗能次之,本章提出的給定時間能量最優軌跡規劃方法(fǎ)耗能最少。這也驗證了本章提出方法的有效性。
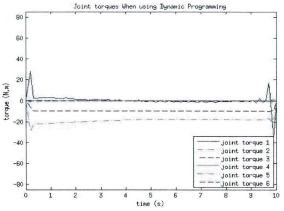
圖4.8給定時間(jiān)能量最優軌跡規劃驅動力矩曲線
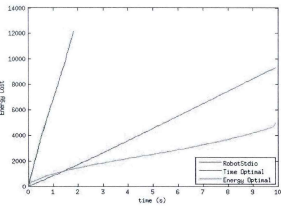
圖4.9不同軌跡(jì)規劃方法的耗能曲線對比
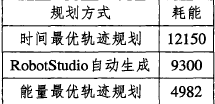
表4.1不同規(guī)効方式的耗能對比
4.5本章小結(jié)
本(běn)章根據己知的時(shí)間最優軌跡規劃結果,結合動態規劃算法,提出了給定時(shí)間的能量最優軌(guǐ)跡規劃問題進行求解的方法,並給出了具體的算法實現偽代碼。最後在六自由(yóu)度工業機械臂IRB120上進行相應的軌跡規劃,遁過(guò)與時間最優(yōu)軌跡規劃(huá)結果和工業(yè)機(jī)械(xiè)臂運動仿真軟件RobotStu出0中軌跡規劃結果作對比,驗證了此算法在給定運動時間的情況下,對於減(jiǎn)少能耗的有(yǒu)效性。
投(tóu)稿(gǎo)箱:
如果您有機床行(háng)業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行(háng)業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多本(běn)專題新聞
名企推薦






馬")
專題點擊前十
| 更多(duō)

