1 前言
現代化的高速數控加(jiā)工中心具有主軸轉速高、運(yùn)行精度高、加工效率高(gāo)的(de)特點。轉速和精(jīng)度的提高是以高精(jīng)度動(dòng)平衡為前提的,但對於主軸而言,由於製造、安裝誤差以(yǐ)及材料的不均(jun1)勻等因素,不平衡的存在是必然的。由於運轉(zhuǎn)在高速下,主(zhǔ)軸對不平衡控製(zhì)的要求比通常轉子(zǐ)更加嚴格,微小的(de)不平衡都可能導致主軸回轉精度的(de)嚴重喪失乃至軸承支承係(xì)統的失穩(wěn)。隻有將主(zhǔ)軸殘餘不平(píng)衡量控製在(zài)一定範圍內,才能抑製主軸在高速運行過程中的(de)失衡振動,保證零件的加工精度。
為(wéi)減小主軸的(de)不平衡,在設計之初(chū)應盡量避免不對稱結構,在加工(gōng)裝配過(guò)程中盡量減小誤差。即便如(rú)此,主軸不平衡也不可能被完全(quán)消除,因(yīn)此,主軸出廠時會進行初始動平衡(héng)以減小主軸失衡量。然而,主軸刀具(jù)微小的不對(duì)中、磨損或粘刀仍會破壞原有的動平衡。另外,主軸刀具係統受切削(xuē)力激勵、熱變形以及高速旋轉離心力等複雜工況的幹擾,也會破壞主軸的動平衡(héng),從而使得高速機床主軸係統的穩定性被破壞。顯然,若每次都采用傳統離線停機動(dòng)平衡的(de)方式來消除微小(xiǎo)失衡(héng)量,就意味著自動化環節(jiē)的(de)中斷,破壞(huài)了高效加工的原則。因此,開展高速主軸動平衡與其在線控製技術(shù)的研究,能充分發揮高速主軸(zhóu)的效能,保障機床的(de)長期穩定和高效運行,進而(ér)提高(gāo)我國機床工業和機械製造業的整體水平。
2 高速主(zhǔ)軸動(dòng)平衡及其在線控製技術(shù)現狀及分析
2.1 不平衡識別技術
經典的柔性轉子動平衡方法可大致分為兩種類型,即模態平衡法[1]和影響係數法[2]。這兩種方法各有其局限性。對模態平衡法而言,其不平衡識別受(shòu)支承特性的影響較大(dà),用於軸係平衡時臨界轉速附近不易獲得的單一振型。對影響係數法而言,在高速下平(píng)衡(héng)時啟動次數多,高階振型敏感性降(jiàng)低。因此,Parkison 等(děng)[3]提出了(le)綜合(hé)平衡的概念,即在影響(xiǎng)係數法的基礎上利用(yòng)模態平(píng)衡法中的振型分離的特點選擇平衡(héng)參數。這種方(fāng)法(fǎ)一定程度上結合了二者優點,但仍需多次試重。
為提高平衡效率和精度(dù),國內外學者(zhě)近年來在低速動平(píng)衡和無(wú)試重動平衡等方麵展開研究。傳(chuán)統平衡方法(fǎ)平(píng)衡柔性轉子時必須在高速下進(jìn)行,否則隻能進行剛性(xìng)轉子的動平衡。低速動平衡技術[4~6]正是在這種背景下發展起來的,其通過分析轉子在臨界轉速前(qián)後振動特性的變化規律,通過信號(hào)處理等方式在低速下獲取轉子高階振型信息,並(bìng)根據一定策略將多階(jiē)振型不平衡量予以分(fèn)解及校正,從而達到平衡的目的。無試重(chóng)平(píng)衡技術是一種“不需要對轉子添加試重就能得(dé)出轉子不平衡幅值(zhí)與相位”的(de)新方法(fǎ),該技術可主要分為兩(liǎng)大類:a. 通過(guò)建立動力學模(mó)型,結合失衡振(zhèn)動數據精確反求出不平衡質量,其本質上屬於(yú)轉子不平(píng)衡(héng)參數辨識過程。這類方法在平衡效率上有較(jiào)大優(yōu)勢,得到國內外研究的重點關(guān)注[7~9];b. 建立轉子不平衡與(yǔ)振動信號間的映射機製,通過優化算法使仿(fǎng)真不平衡響應與測量不平(píng)衡響應間的差(chà)異達到(dào)最小值,從而得到不平衡量。這類方法不受反問題病(bìng)態程度的影響,但(dàn)是由於大型轉子不平衡(héng)未知數多(duō)以(yǐ)及相關平麵的存在,成為製約這種方法的“瓶頸”[10, 11]。
總體(tǐ)來說,不管動平衡技術(shù)如何發展,始終要遵循科技促進生產(chǎn)力這一宗旨。因此,如何提(tí)高平衡精度、效率是所有動平衡技術的核心(xīn)所在。雖然無試重平衡方法還遠(yuǎn)未形成係統化的平衡理論,但無試重平衡技術所(suǒ)體現(xiàn)出來的高平衡效率使其成(chéng)為國內外研究的(de)熱點。同樣,現有的低速平衡法雖然還遠沒有成熟(shú),但低速平衡法可(kě)以簡化(huà)動平(píng)衡過(guò)程、提(tí)高動(dòng)平衡安全性及效(xiào)率。因此,如何在(zài)低速下更準確地平(píng)衡柔性轉子也必將成為高(gāo)速主(zhǔ)軸動平衡技術的發展趨勢。
2.2 在線(xiàn)自動平衡技術現狀及分析
轉(zhuǎn)子(zǐ)在線自動平衡技術主要包(bāo)括被動平衡技術和主動平衡技術。被動平衡技術的原理在(zài)於(yú):當柔性轉子工作在臨界轉速以上(shàng)時,其(qí)原始不平衡(héng)與振動響應(yīng)呈鈍角,配重塊會受離心力作用自動補償原(yuán)始不平衡。該(gāi)技術精度(dù)有限,在工業(yè)現(xiàn)場較少應用。主動平衡技術采取(qǔ)由外部輸入能量的(de)控製方式主動實現轉子自(zì)動平衡。通常分為兩類:一類是直接主(zhǔ)動振動控(kòng)製,它直接在旋轉物體上施加外(wài)力抵消不平衡導致的離心力,達到抑振(zhèn)的目(mù)的,外部力一般通(tōng)過電磁力、液(yè)體(tǐ)衝(chōng)擊力等形式(shì)施加。另一類是質量重新分布控製,它利(lì)用隨轉子共同旋轉的平衡終端對轉子進行平衡,平(píng)衡終端(duān)內部可(kě)以通過調整質量分布改善不平衡狀態。
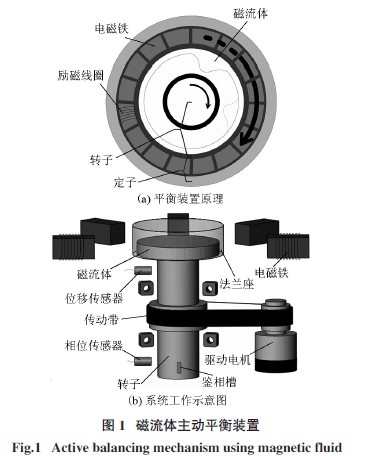
國(guó)內(nèi)外關於自動平衡技術方麵的研究較多,加拿大(dà)學者Van de Vergte[12]首先研究出一種通過(guò)位置可控的配重質(zhì)量實(shí)現平衡調整的(de)主動(dòng)動平衡裝置,質量塊由電機驅動,可沿固定(dìng)於平衡終(zhōng)端的運動路徑(jìng)移動。1998 年,浙江大學曾勝(shèng)等[13]研製了基於電機原理的(de)電磁式,其通過向定子線圈通直流電,驅動平(píng)衡盤轉動,最高(gāo)運行轉速(sù)為3 000 r/min。1999年,美國(guó)學者Dyer 等(děng)[14]研製出一(yī)種由電磁力驅動的平衡裝(zhuāng)置,該裝置中含有配重質量的動環隨轉子旋轉,工作時由固定在主軸法蘭位置的靜環提供電磁力驅動動環(huán)上的質量塊旋(xuán)轉,從而改(gǎi)變平衡終端中的質量分布。2006 年,韓國學(xué)者Moon 等(děng)[15]基於類(lèi)似的(de)原理(lǐ),研製出一種(zhǒng)電磁式平衡(héng)裝置,並通過影響係(xì)數法在轉速為14 400 r/min 時實現了主軸平衡實(shí)驗。2006 年,北(běi)京化工大學高金吉等[16]研究了通過持續噴液(yè)產(chǎn)生可控液體(tǐ)衝擊力的平衡裝置,並仿真驗證了其(qí)可行性。2008 年,日本學者Nakamoto等[17]設計了一種(zhǒng)新型(xíng)的采用磁流體作為平(píng)衡質量的平衡裝置(見(jiàn)圖1),其通過改變平衡終端外圍磁場的分布(bù)達到改變終(zhōng)端內磁流體分布(bù)的目的,該裝置在6 000 r/min 時進(jìn)行了驗證。
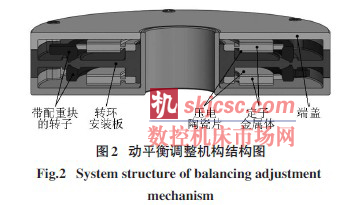
2011 年,西安交通大學梅雪鬆(sōng)等[18]提出一(yī)種基於壓電驅動原理的平衡執行(háng)裝置原理,通過無線感應變壓器驅動壓電陶(táo)瓷片產生麵內駐波振動,進而驅使安裝有配重質量塊的動環旋轉,改變主軸轉子質心,該方案具有自鎖(suǒ)功能,調整精度較高,適合高速高精度轉子平(píng)衡,其結構如圖2 所(suǒ)示。同年,北京化工大學(xué)黃立權等[19]研究(jiū)了(le)轉子同頻振動的在線(xiàn)抵消策略,對轉子同頻振動及電(diàn)磁力可(kě)控特性進(jìn)行了分析。2012 年,西(xī)安交通大學(xué)馬石磊(lěi)等[20]提出一種基於靜磁場的新型電磁動平衡裝置,並在5 000 r/min 時在滑動軸承支承主軸中得到驗證,該裝置僅需在待平衡轉(zhuǎn)子(zǐ)上(shàng)加工特定形狀凸台,即可產生用(yòng)於抑製失衡振動的同頻(pín)電磁力,其附加質(zhì)量較小,在高速轉子平衡方麵有一定(dìng)優勢。
從平(píng)衡原理可知,直接主動振動(dòng)控製方式響應(yīng)迅速,便於實時控製,但其並(bìng)沒有從(cóng)本質上消除導致振動的不平衡量,而是通(tōng)過施加外力強行抵消失衡離心力,當主軸運行至(zhì)超高速(sù)時(shí),離心力急劇增大,係統往往難以產生足夠大的外力來抑製振(zhèn)動。此(cǐ)外,這種平衡(héng)控製方式需要(yào)係統始終(zhōng)處於使能模式,對於重型轉子而言,相對耗能較(jiào)大。最為關鍵的(de)是,若遭遇斷(duàn)電等(děng)意外情況,在高速旋轉的轉子(zǐ)將(jiāng)會瞬間喪失平(píng)衡(héng)狀(zhuàng)態,容易發生不可預估的風險。根據上(shàng)述現狀分析同樣可知,質量重新(xīn)分布控(kòng)製方式相對應用較廣,其(qí)主要可分為(wéi)3種類(lèi)型。
1)通過可控微型電機驅動質量塊移動的電機驅動(dòng)式。這類裝置易於實現,平衡狀(zhuàng)態利於保持,但機械結構複雜,尺寸較大,限製了平衡轉速的提高。
2)通過電磁力改(gǎi)變平衡質量塊分布的電磁力驅動式。這(zhè)類裝置機械結構(gòu)及(jí)控製係統都比較複雜,且溫度過高時,永磁鐵容易退磁,同時會受強磁場幹擾。
3)通過外部填充(chōng)質量材料以改變轉子質量分布的外部噴液填充式。這類裝置是唯一能實現定向質量補償的控製技(jì)術,不用向(xiàng)平衡終端輸送(sòng)驅動(dòng)控製信號,省略了配重塊路徑尋優過程,且其結(jié)構簡單,易於輕量化。但其平衡精度受容腔形狀和液束控製精度的共同影響,需要合(hé)理設計係(xì)統參數。
綜合來說,盡(jìn)管(guǎn)自(zì)動平衡技術(shù)已取得(dé)了較大的進展,並且國外已有較為成熟的產品,但出於商業利益的考慮,這些(xiē)公司的相關技(jì)術研究資料對我國壟斷,僅能(néng)在相關網站查到產品簡要介紹。我國從20 世紀80 年代開始,對在線(xiàn)動平衡技術(shù)也進行了大量的研(yán)究,但平(píng)衡轉速基本都(dōu)在5 000 r/min 以下,平衡精度也不太高,和世界上先進水平相比仍有(yǒu)較大差距。目前對於在線平(píng)衡裝置主要還是依靠國外(wài)進口,並(bìng)且價(jià)格十分昂貴,甚至與主軸價格持平。因此,有必要研究能滿足高速高精度要求的在線自動平衡調整裝置,提升我國高速主軸在線動(dòng)平衡水平(píng)。
3 噴(pēn)液式在線動平衡(héng)技術
3.1 工作原理
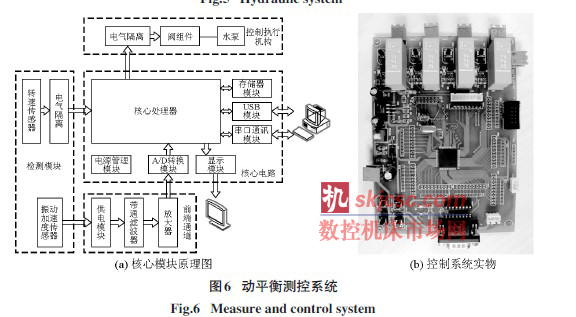
西安交通大學在噴液式在(zài)線動平衡(héng)技(jì)術方麵開展了深(shēn)入研究,構建(jiàn)了如(rú)圖3 所示(shì)的在線噴液(yè)式動平衡係(xì)統的原理(lǐ)圖。係統主要(yào)由(yóu)平衡終端、液(yè)壓係統、測控係統等幾部分組成。平(píng)衡終端由內圈和外圈過盈配合構成,整個結構裝配後可形成沿(yán)圓周均勻分布的4 個容(róng)腔(qiāng),可用於存放平衡液體,改(gǎi)變旋轉部件的質量分布。液(yè)壓係統包括液壓泵、穩壓閥(fá)、電磁閥及噴(pēn)頭(tóu)等結構,主要用於產生一定壓力的液體束(shù),便於噴射入平衡終端徑向位置上的(de)液體槽中。測控係統中包(bāo)括傳感器和控製器兩(liǎng)部分(fèn)。傳感器主要為振動傳感器和速度傳感器,用於采集轉子振動信息及轉速,為控製器提供數據支撐。控製器主(zhǔ)要根據轉子振動狀(zhuàng)態的變化,判斷失衡方位,通(tōng)過閥組件控製平衡液體噴射方位、時間。
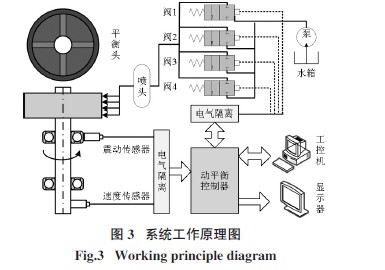
係統(tǒng)工作過程中,首先(xiān)由振動(dòng)傳感器拾(shí)取由於(yú)主軸轉子(zǐ)的原始不平衡量導致的振動,並將該振動信號經控製器計算得出相(xiàng)應的噴液質量,再由閥組件控製電磁閥液體注入對(duì)應的平衡終端(duān),平衡終端旋轉的時候,腔內液體會因為離心力而附(fù)著在(zài)外側腔壁上,通過(guò)這種方式來調節質量(liàng)分布,進而進行動平衡,這就是噴液式平衡係統的工作原理。
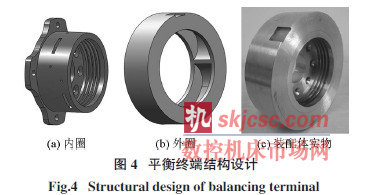
平衡終端是噴液式動平衡係統中的核心部件,其隨轉子高(gāo)速旋轉,能否保證平衡液在高速下準確進入平衡液容腔是整個係統成敗的關鍵。如圖4 所示,平衡終端結構由兩部分(fèn)組成,包(bāo)括依靠套(tào)筒實現軸向定位的平(píng)衡終端內圈,以及通過(guò)過盈配合固定在(zài)內圈外壁上的平衡終端外圈(quān)。整(zhěng)個終端結(jié)構的內圈和(hé)外(wài)圈通過過盈配合裝配,整體(tǐ)通過錐麵配合安裝(zhuāng)在主軸上同主軸一起旋轉。當4 個液體(tǐ)腔充滿(mǎn)平衡液時(shí),整個平衡終端重量約為350 g。相比較於工業現場常用的幾千克甚至幾十千克的平衡終端(duān)而言,其在同類產品中重量優勢非(fēi)常明(míng)顯,有利於該平(píng)衡終端在高速下應用。

3.2 實驗及分析
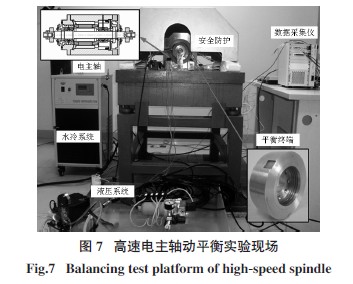
為驗證噴(pēn)液式自動平衡裝置在高速下的平衡效果,西(xī)安交通大學基(jī)於150SD40Q7 型的電主軸構建高(gāo)速(sù)主(zhǔ)軸動平衡(héng)實驗平台(tái),圖7 為(wéi)實驗現場。其中,電主(zhǔ)軸采用兩(liǎng)端伸出設計,電機位於主軸中央,兩側分布支承軸承(chéng),主軸兩端伸出可用於(yú)安裝噴液式自動平衡裝置終端。該主軸采用油氣潤(rùn)滑方式,內(nèi)部采用高速(sù)陶瓷球軸承支承,振動傳感器安裝在(zài)對應軸承位置的主軸外殼頂端。考慮到高速實驗的危險性,主軸外圍安裝了防護罩。
實驗過程中,高轉(zhuǎn)速的動平衡從低速到高速逐步進行。由於轉速的增加,在低轉速(sù)下的不平衡量振(zhèn)動會(huì)隨著增加,因此對於初始的不(bú)平衡量要進行校正,在16 500 r/min時進行低速粗平衡,在20 700 r/min時進行高速精細平衡,然後(hòu)將主(zhǔ)軸升速至工作轉速運行,觀(guān)察主(zhǔ)軸振動狀態,最後降速至(zhì)停機。兩(liǎng)次自動平衡效果分別如圖8和圖9所示。
從(cóng)圖8 可以看出,主軸升速至16 500 r/min 時進行第一次動平衡,平衡後振動(dòng)值由2.41 mm/s 降至0.05 mm/s,之後繼續增速,同時檢測不平衡量振(zhèn)動值,當轉速達到20 700 r/min 的(de)時(shí)候,失衡振動隨著轉速升高而增大,此時進行第二次動平(píng)衡。從圖9可以看出,二次自動平衡後,不平衡量振動值(zhí)由1.60 mm/s 降至0.34 mm/s。且隨著平衡過(guò)程的進行(háng),主軸噪音顯著降低,基座振動下降亦非常明顯。此外,對(duì)比圖8 與圖9 可以看出,16 500 r/min 時的平衡效果比20 700 r/min 時要好,這主要是由於高轉速下,非失衡故(gù)障導致的轉頻振(zhèn)動也會有一定量的增加,這影響了(le)最終振動抑製(zhì)的效果。總體而(ér)言,噴液式(shì)自動平衡裝置對於機床主軸平衡效果明顯,有助於提高主軸(zhóu)運行穩定性,保證主軸(zhóu)回轉精度。
4 結語(yǔ)
盡管(guǎn)國內外對在線自動(dòng)平衡技(jì)術進行了深入研究,但現有的在線動平衡裝置多數應用在磨床砂輪主(zhǔ)軸、風機、航(háng)空(kōng)發動機等大型集中量式旋轉機械動平衡中,對用於超高速(sù)加工中心主軸的平衡裝置研(yán)究較少。顯然,待平衡(héng)轉子質量越小,對在線動平衡(héng)裝置的輕量化(huà)要求就越高(gāo);待平衡轉子轉速越高,對在(zài)線動平衡裝置的平衡精度(dù)就越高。實驗結果表明,西安交通(tōng)大學(xué)研製的高速主軸噴液式在線自動平衡裝置能在20 700 r/min 時完成自動平衡操作,並(bìng)將不平衡量振(zhèn)動值(zhí)由1.60 mm/s 降至0.34 mm/s,有效完(wán)成了高速主軸的失衡振動在線抑(yì)製,提升了主軸的動態(tài)性能。
受複雜支承(chéng)形式、加工狀態、主軸轉子結構布局等諸(zhū)多因素影響,動平衡技術仍有許多值得探索的問題,隨著現代加工技術標準的不斷(duàn)提高,在線自動動平衡(héng)技術也必須朝低附加質量、高精度、快(kuài)速響應以及智能化方向發展。總體而言,本文(wén)所論述(shù)的主軸自動平衡技術(shù)能有效保障機床主軸的平穩、精確運行(háng),對於(yú)提高國家裝備製造業的水(shuǐ)平具(jù)有一定的理論意(yì)義與實用價值。
如果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊合作,歡迎聯(lián)係本網編輯部, 郵箱(xiāng):skjcsc@vip.sina.com








